Selected Projects
A selection of research systems, datasets, and interactive prototypes spanning wearable robotics, embodied AI, and human–robot interaction.
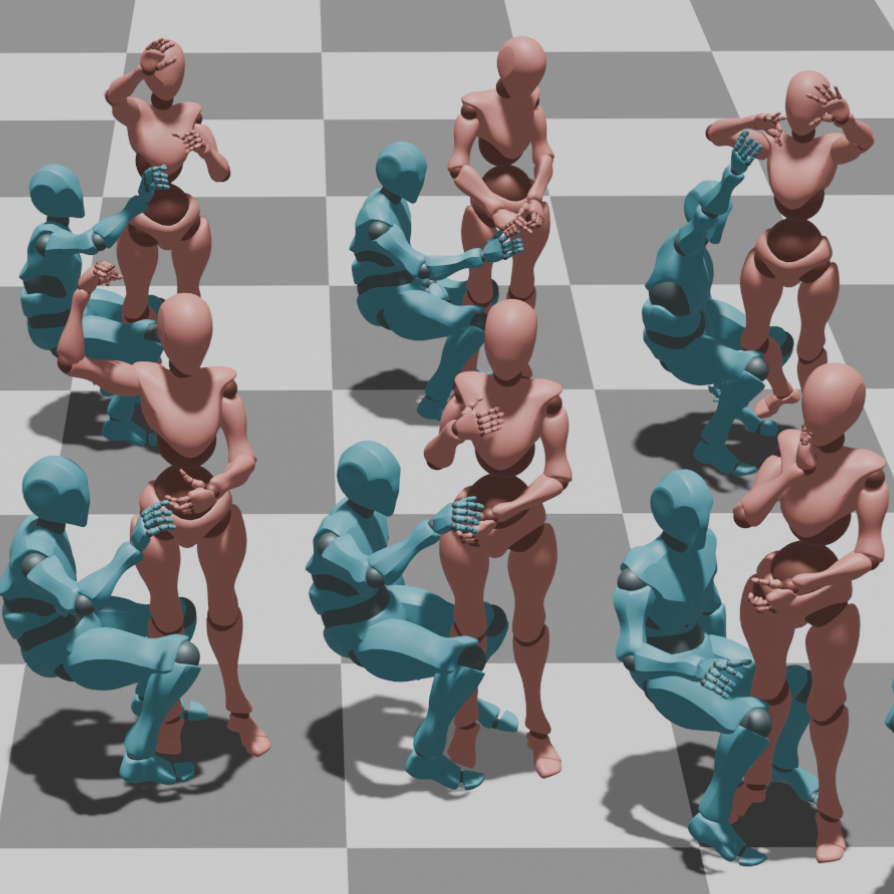 | 3HANDS Dataset
A multimodal dataset for learning naturalistic human handovers with supernumerary robotic limbs.
946 handover demonstrations across 12 daily activities.
[Publication] [Code] |
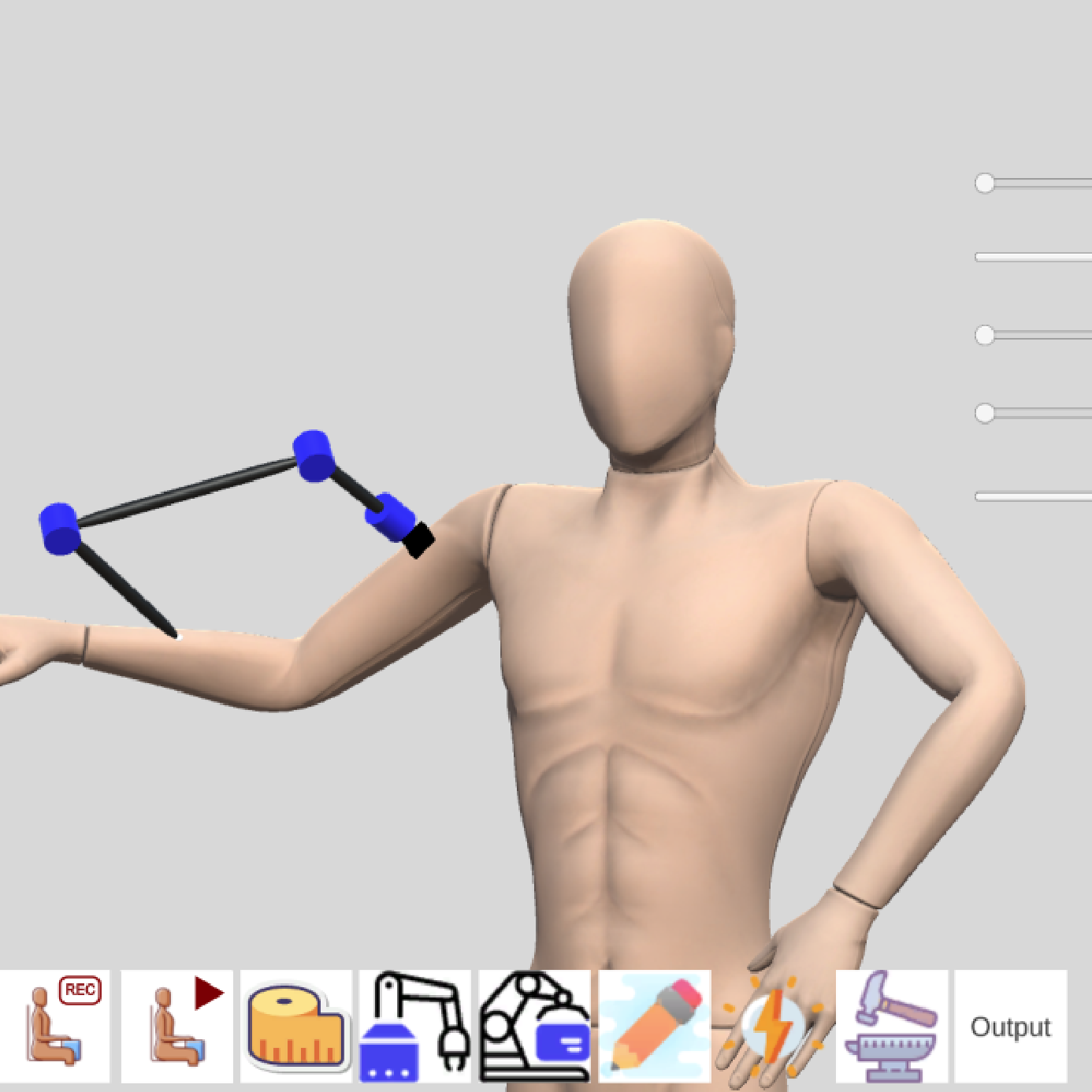 | WRLKit
A computational design framework for personalized wearable robotic limbs and body-aware robotic augmentation.
[Publication] [Project] |
 | GestureCoach
An LLM-driven system for rehearsing engaging presentations with gesture recommendations and feedback.
[Publication] |
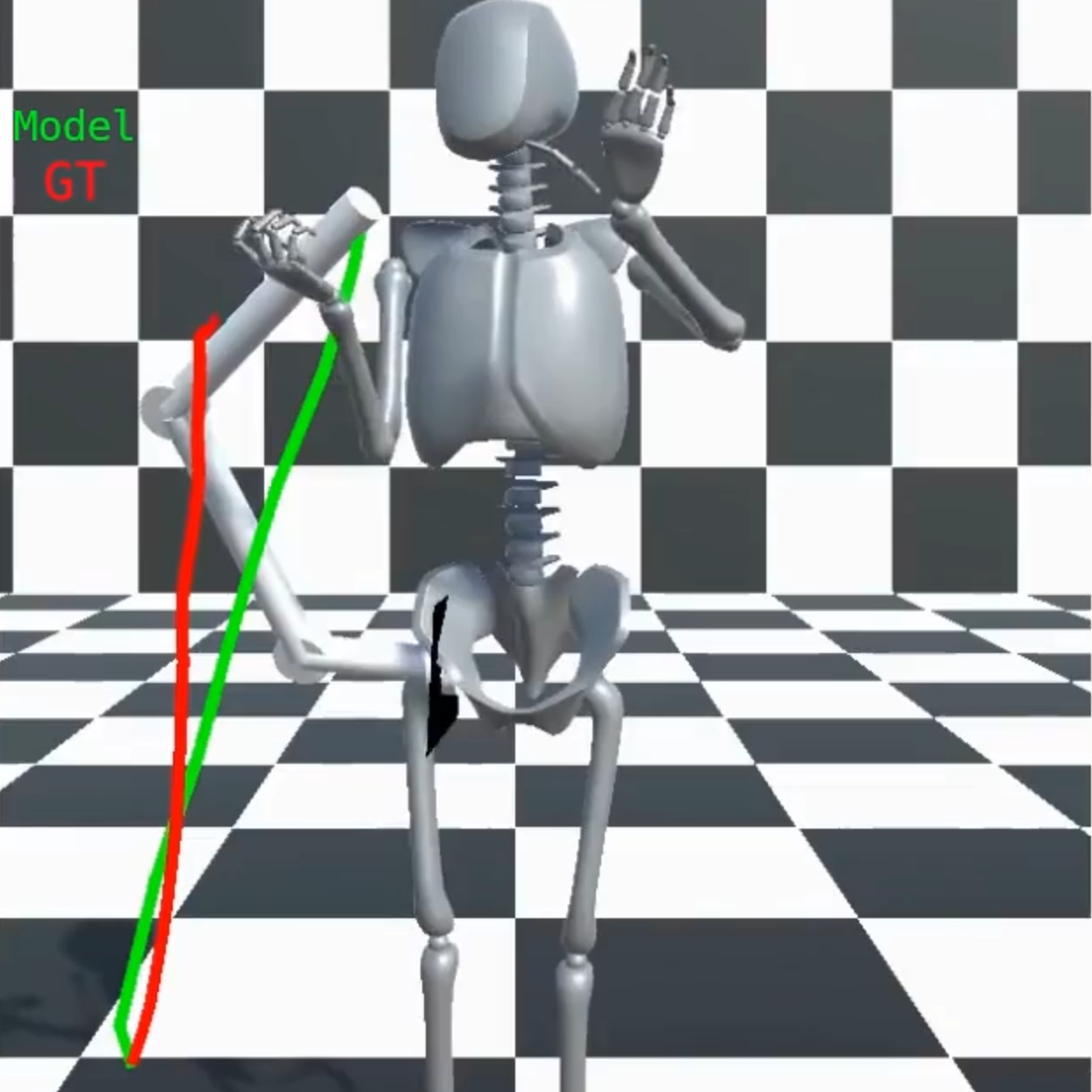 | Context-Aware Adaptive Handovers
Ongoing work on multimodal perception and generative motion modeling for intuitive robotic handovers.
Currently under review |
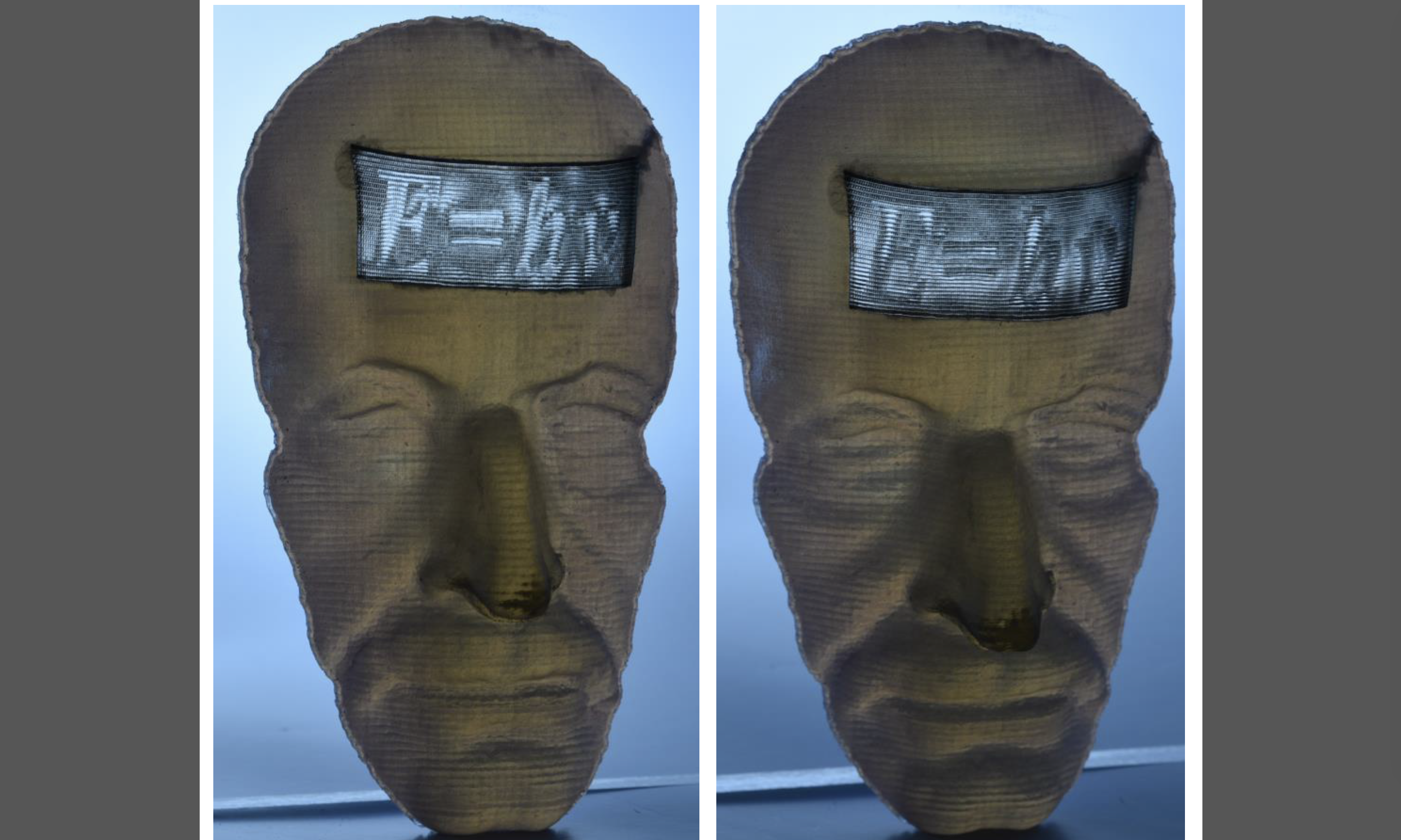 | Fabrication of Moiré on Curved Surfaces
A fabrication-aware computational pipeline for programmable surface patterning and perception-driven design.
[Paper] [Patent] |
 | Kinova Unity ROS2 CLIK 6D Controller
This project provides a simulation framework for workspace control of a Kinova robotic arm using a Closed-Loop Inverse Kinematics (CLIK) controller.
[Project] |
