
Artin Saberpour Abadian
PhD Candidate — Human–Computer Interaction Lab Saarland University
I develop robotic systems that interact with humans in ways that feel natural, intuitive, and seamlessly embodied.
My research lies at the intersection of Human–Robot Interaction, wearable robotics, generative motion models, and embodied AI, with a focus on enabling fluid collaboration between humans and robotic systems.
Research Vision
My work explores how robotic systems can become intuitive collaborators and extensions of the human body.
I study how humans perceive robot motion, intention, and behavior, and use these insights to design systems that support more natural interaction in shared tasks.
A major focus of my research is supernumerary robotic limbs and context-aware human–robot handovers, where generative models help robotic systems move in ways that align with human expectations and contextual cues.
Research Themes
Human–Robot Interaction
Understanding how humans perceive robotic motion, intent, and behavior.
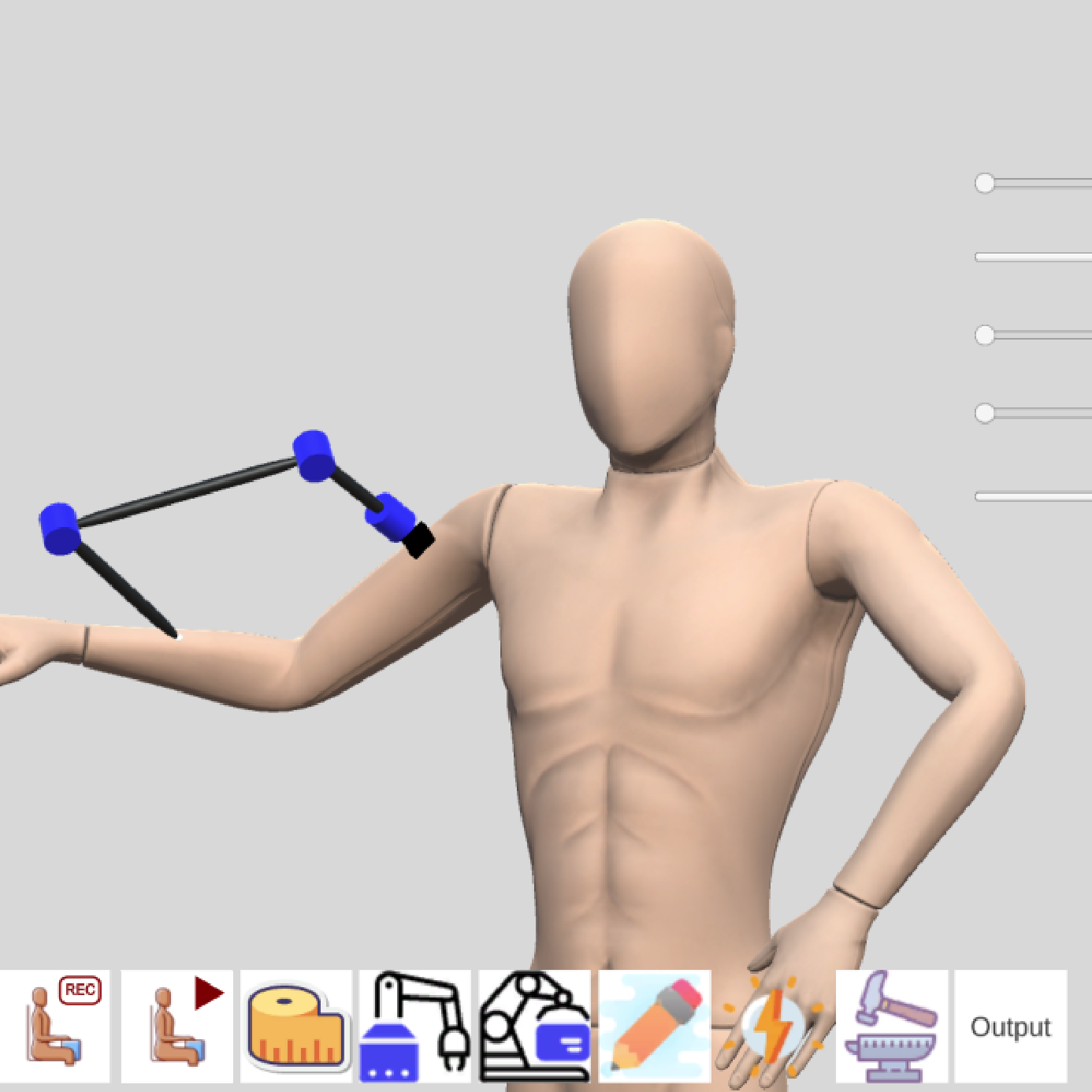
Wearable Robotics
Designing supernumerary robotic limbs that augment human capabilities.
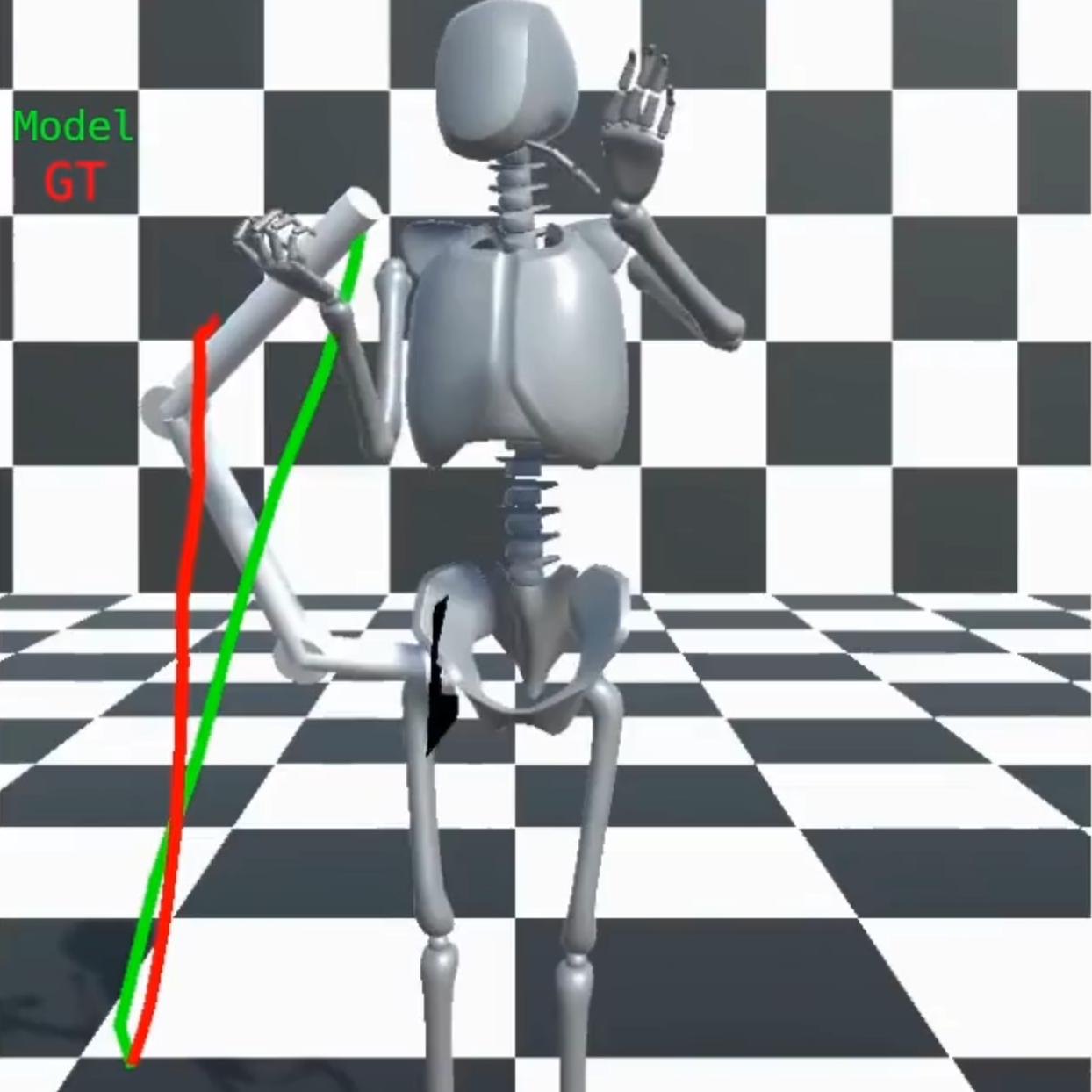
Generative Robotics
Learning naturalistic robot motion using diffusion and transformer models.
Multimodal Perception
Modeling intent from scene, motion, and contextual signals.
Selected Research Highlights
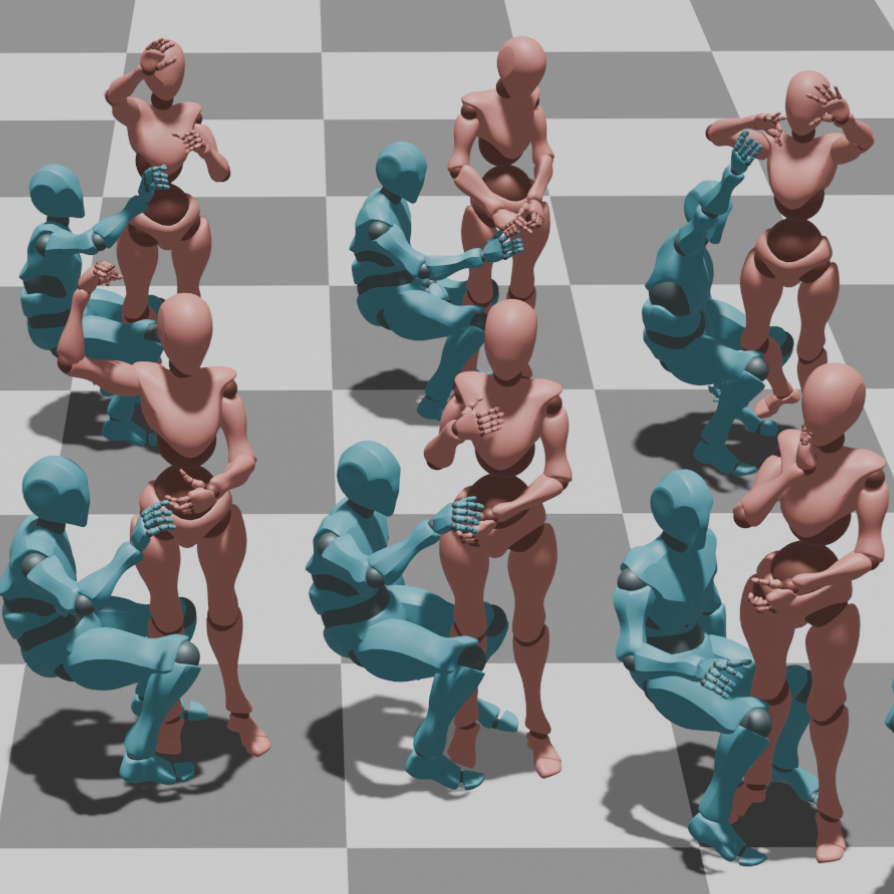
3HANDS Dataset
A multimodal dataset for learning naturalistic handovers with supernumerary robotic limbs.
Adaptive context aware Handovers with foundation models
Context-aware robotic handovers using scene understanding and foundation models.
I work on human-centered robotic systems at the intersection of wearable robotics, embodied AI, and generative motion modeling.
For a broader overview, see the Projects and Publications sections.
About
I am currently a PhD candidate at Saarland University’s HCI Lab, working on wearable robotics and embodied AI.
I am particularly interested in building robotic systems that augment human capability while remaining intuitive, ergonomic, and socially understandable.